Competition
The University Rover Challenge (URC) is the world's premier robotics competition for college students. Against the backdrop of the Utah desert, the rover completes tasks that simulate planetary exploration on Mars. Competing against 34 other teams over 4 days, the rover participates in four challenges outlined below.
Mission 1: Science
• Investigate a site for the presence of life by collecting samples in the field, performing basic science evaluation on board, and storing at least one sample in a cache.
Before any testing commences, the rover must gather GNSS coordinates and use on-board cameras to document potential test sites. After investigation of at least two sites, teams collect a sub-surface sample from one of the sites at a depth of 10 cm or deeper. One sample must be placed in a sealed cache to prevent spillage and returned to judges, upon where competitors will discuss the on-board soil testing results.

Mission 2: Delivery
• The rover, assisted by a drone, must deliver a variety of objects to astronauts stationed in the field. Traversing rugged terrain, the rover will travel up to 2 kilometers as it completes this mission in two stages.
Stage 1: The rover opens a toolbox, picks up an object inside, and deliver it to a cache. Once this has been completed, it picks up wreckage pieces and delivers them to astronaut 1 stationed in the field. Finally, it must navigate from start to end cones, picking up an object and bringing it back to the start. With only 35 minutes to cover 2 kilometers, the rover must be efficient in its navigation and uses a 6 wheel frame with four driving wheels to maneuver through uneven terrain.
Stage 2: After taking an hour to recharge, the rover needs to find a designated object within a 20 meter radius and deliver it to astronaut 2. It must also find a piece of hidden wreckage in the field and deliver to the same astronaut.
Drone: The drone assists the rover by reading signs, searching large areas or acting as radio relay in areas where the rover on the ground may have poor reception. It must follow a rotary wing design and carry dummy weight equal to battery to simulate gravity on Mars.

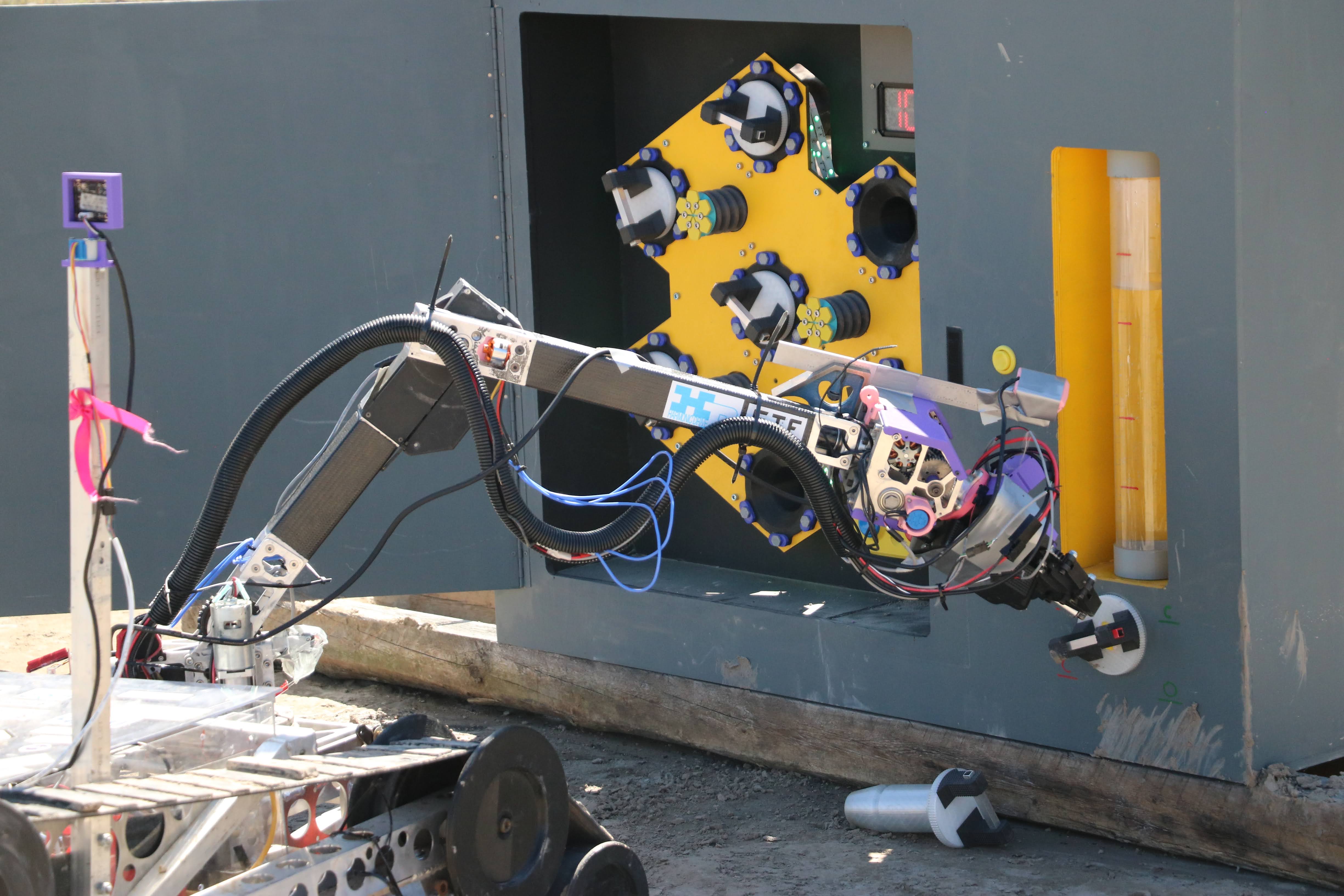
Mission 3: Equipment Servicing
• Perform dexterous operations using a robotic arm on a mock lander, such as turning a valve handle, push buttons, flip switches, turn knobs in a 30 minute time limit.
The cache: In the first part of the challenge, the rover uses the arm to insert a tube into a cache container, and then must close and lock the lid. Once this has commenced, it must pick the cache up and transport it to the lander. This cache will then be inserted into a tight-fitting space in a drawer, which will be opened and closed.
The panel: Using its arm, the rover must autonomously type a code that the team is given prior to deployment. Then, it inserts a cable into a USB slot on the lander, and reads GNSS coordinates from a card. Finally, it connects a hose from a fuel tank to the lander.
Mission 4: Autonomous Navigation
• Autonomously travel to a series of locations and find objects.
To complete this mission, the rover must autonomously traverse to two GNSS-only locations, 2 posts marked with Augmented Reality tags, and three objects placed on the ground. These three objects must be identified through autonomous image detection, two of which being partially hidden behind rocks or other naturally occurring obstacles.